CNRS Innovation - De la recherche à l'innovation depuis plus de 30 ans
0
Experts à votre service
0
Contrats d'exploitation signés depuis 2012
0
Projets accompagnés en prématuration depuis 2014
0
Start-up accompagnées par RISE depuis 2019
© Patrick VENAIL/CNRS Photothèque
Notre actualité
Voir toutes les actus S’inscrire à la Lettre Innovation du CNRS La Lettre Innovation
27 mars 2024
Les levées de fonds du mois de février 2024
Chaque mois, retrouvez les levées de fonds des entreprises issues des laboratoires sous tutelle du CNRS.
Lire la suite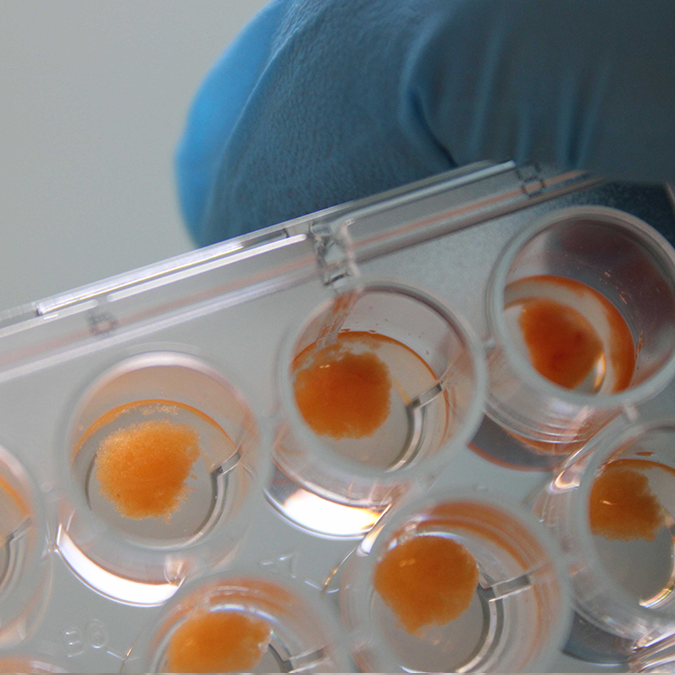
22 mars 2024
ExAdEx-Innov : Une biotechnologie novatrice pour l’étude de la graisse humaine
Conserver de la graisse humaine au plus près de son état d’origine en culture est une difficulté en soi. Grâce à sa technologie, c’est le défi que relève ExAdEx-Innov. Cette start-up…
Lire la suite
22 mars 2024
Comment la découverte de chercheurs révolutionne la microscopie de super-résolution
Grâce à une durée de vie grandement rallongée, les tampons permettant aux fluorophores de clignoter en milieu aqueux, conçus par une équipe de l’Institut NeuroMyoGène de Lyon, améliorent…
Lire la suiteDonnez vie à votre projet de start-up dans les meilleures conditions
découvrez notre programme
d’accompagnement à la création de start-up
Des experts passionnés au service de l'innovation
CNRS Innovation fait converger les talents et les énergies nourries par la pluralité des profils : diplômes combinés avec expérience et savoir-faire constituent une équipe d’excellence.

-
Nous collaborons avec des Start-up
Depuis la création de Cardiawave, CNRS Innovation a toujours été disponible et réactif. Nous avons bénéficié de son expérience et de son expertise en propriété intellectuelle et en valorisation pour valider notre stratégie de protection intellectuelle.

Benjamin Bertrand
CEO Cardiawave
-
Nous accompagnons les pôles de compétitivité
CNRS Innovation est partenaire du salon international Cosmetic 360 depuis sa création en 2015. Dans ce cadre, les chargés d’affaires de CNRS Innovation proposent des conférences afin de présenter leur savoir-faire en matière de Propriété Industrielle et de conseil en innovation.

Christophe MASSON,
Deputy CEO de Cosmetic Valley
-
Nous collaborons avec des Start-up
CNRS Innovation nous soutient depuis notre création, initialement via un investissement dans la société et depuis en aidant sur de nombreux sujets, de la propriété intellectuelle à la recherche de financement. En outre, ils ont su s’adapter leur rythme à celui des startups, ce qui en fait un interlocuteur de choix pour les interactions avec le monde académique

Geoffroy Lerosey
CSO de Greenerwave